📌Euler-Lagrange-Model-Based Torque Assignment Control for Multiple In-Wheel Motors with Voltage Vectors Integrated Modulation——Click To See Details
Independent Researcher, Supervisors: Prof. Xiaoyong Zhu, Prof. Lei Xu and Prof. Li Quan
Sep.2023 – Jul.2024
Background:
Current coordination strategies often overlook the nonlinear factors inherent in distributed multi-wheel motor drive systems, especially the flexible coupling caused by the rigid components of the vehicle chassis. This oversight can lead to speed instability and torque imbalances, which may ultimately result in complications such as vehicle slippage and dragging.
Contributions:
- Constructed a joint model for multiple in-wheel motors, using the Euler-Lagrange framework to incorporate electromagnetic and mechanical coupling within a distributed drive system.
- Proposed a real-time torque distribution control law that derived from the joint model, integrates the interconnection and friction damping matrices, with voltage stability tracking included as a constraint.
- Dynamic decoupling of state variables is achieved by proposing a dynamic tuning strategy for the interconnection and friction damping coefficients.
Achievements:
- Manuscript submitted to IEEE Transactions on Industrial Electronics, and is under review (Major Revisions).
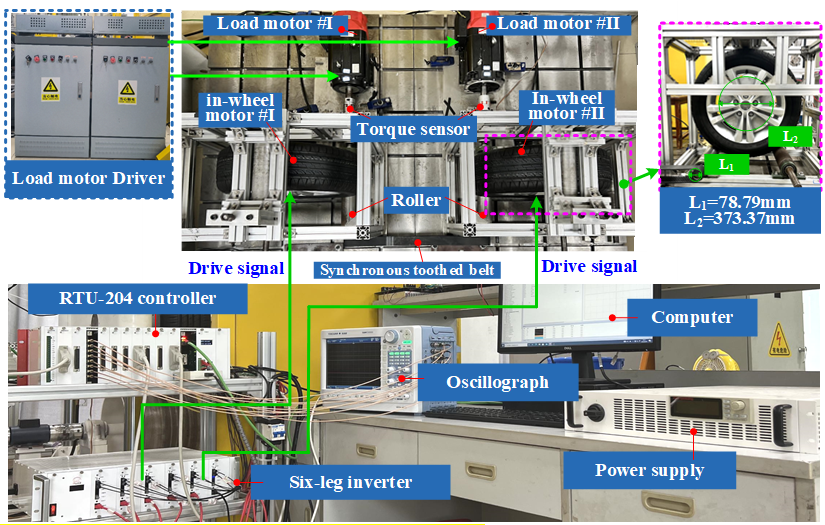
Experiment Platform: