📌Active Disturbance Rejection System for High-Precision Magnetic Suspension Platform
Independent Researcher & principal investigator, Supervisor: Prof.Xinghe Fu
Sep.2021 – Jun.2022
With the advancement of high-speed magnetic levitation trains, electromagnetic levitation control technology is gaining increasing attention. In this project, we develop a high-precision four-point magnetic levitation platform based on a T-shaped structure. By employing a nonlinear model of electromagnets, we implement active disturbance rejection control to identify various disturbances. Additionally, real-time compensation through an extended state observer effectively addresses electromagnetic coupling and load variations, ultimately achieving robust stability control for the platform. More information click here
Achievements:
- Received an ‘Excellent’ (A) grade for my Bachelor’s Graduation Project in 2022.
- Served as principal investigator for a project under the National College Students’ Innovation and Entrepreneurship Training Program (NCETP), successfully completing it with a passing evaluation.
- Successfully presented the outcomes of the NCETP project at the 15th Innovation and Entrepreneurship Achievement Exhibition, Southeast University, 2020.
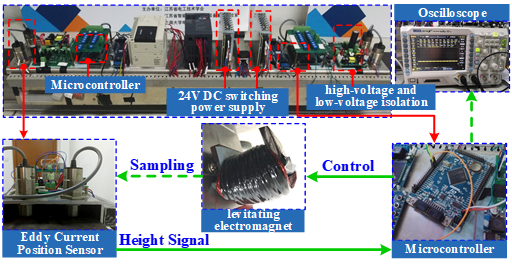
Experiment Platform: